TW-SW01直驅(qū)型風力并網(wǎng)發(fā)電動態(tài)模擬平臺
一、實驗裝置
如圖1所示����,系統(tǒng)主要由監(jiān)控裝置�����、風輪模擬拖動裝置以及永磁同步電機并網(wǎng)發(fā)電裝置三部分組成����,主要軟硬件如表2所示����。機組額定功率取5kW���,這個功率等級基本可以模擬風力發(fā)電機系統(tǒng)的真實情況,具備較好的顯示效果���,但又不會對電網(wǎng)有太大的沖擊����,對進行試驗的學生來講也較為安全;另外5kW的電機產(chǎn)品在重量��、大小等方面都較為合適,電力電子器件的選型較容易����。


發(fā)電實驗臺圖

發(fā)電實驗臺圖
1.1 監(jiān)控裝置
監(jiān)控裝置主要由PC機和PLC組成�����。PLC主要功能是采集實驗平臺各組成單元的各項數(shù)據(jù)(如電機的電壓�、電流和轉(zhuǎn)速等,電力電子并網(wǎng)接口的電壓��、電流等)、啟停并向變頻器發(fā)出轉(zhuǎn)速指令����、向電力電子并網(wǎng)接口電路的DSP控制卡發(fā)出啟停和并網(wǎng)指令、修改實驗平臺參數(shù)等��,監(jiān)視整個系統(tǒng)的工況。PC機的主要功能是將PLC采集到的數(shù)據(jù)存儲以及以可視化的方式顯示出來�����,便于直觀了解系統(tǒng)的工況��,另外用戶還可以通過圖形化的使用界面操作整個實驗平臺���,比如啟動風輪模擬拖動裝置帶動永磁同步發(fā)電機按某一轉(zhuǎn)速轉(zhuǎn)動�、啟動電力電子接口電力實現(xiàn)系統(tǒng)的并網(wǎng)和脫網(wǎng)等����。
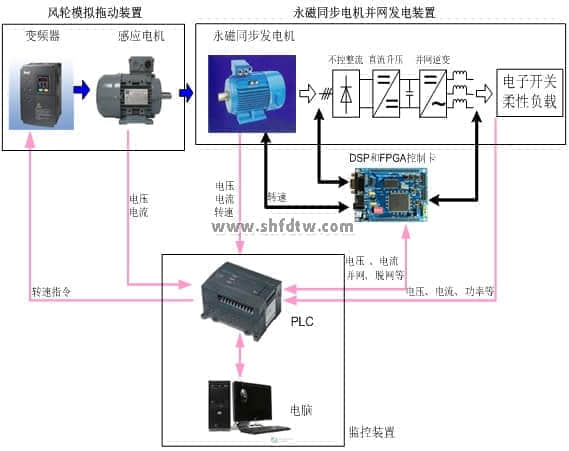
圖1直驅(qū)型永磁同步電機風力并網(wǎng)發(fā)電動態(tài)模擬系統(tǒng)
系統(tǒng)結(jié)構圖
表2 直驅(qū)式實驗系統(tǒng)的主要軟硬件清單
|
名 稱
|
規(guī) 格
|
|
臺式個人電腦
|
|
|
PLC可編程控制器
|
含數(shù)字量輸入輸出�、模擬量輸入輸出�����、網(wǎng)絡模塊等
|
|
5.5kW變頻器
|
5.5kW,1500rpm
|
|
永磁同步發(fā)電機
|
5kW,1500rpm
額定相電壓為160~220V(有效值)
|
|
不控整流器
|
6個1200V��、75A功率二極管所組成
|
|
直流升壓變換器
|
1個1200V 75A IGBT、1個1200V 75A 功率二極管和20A 10mH電抗器
|
|
并網(wǎng)逆變器
|
3相橋IPM模塊組成(1200V��,75A)
3個20A 10mH 電抗器
|
|
DSP控制器
|
基于DSP28335的控制器(開發(fā)系統(tǒng))
|
|
單路接觸器開關
|
電流50A(系統(tǒng)并網(wǎng)啟動)
|
|
三相接觸器開關
|
相電流30A(并網(wǎng)逆變器啟動)
|
|
電機轉(zhuǎn)矩傳感器
|
|
|
電機光電測速碼盤
|
|
|
電壓電流傳感器等
|
|
|
PLC編程軟件
|
用于PLC編程
|
|
組態(tài)軟件
|
在計算機上開發(fā)圖形化控制�����、顯示��、記錄系統(tǒng)
|
|
其他元件
|
如液晶顯示�、操作面板��、傳感器等
|
1.2 永磁同步電機并網(wǎng)發(fā)電裝置
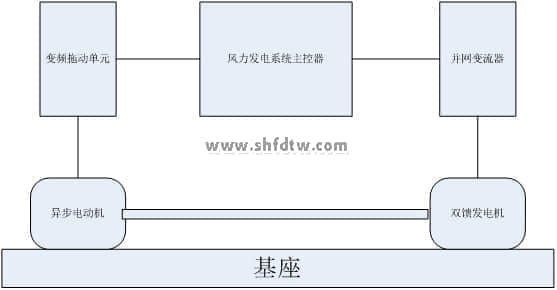
如圖2所示���,永磁同步電機并網(wǎng)發(fā)電裝置主要由5kW永磁同步發(fā)電機���、電力電子并網(wǎng)接口(由不控整流、boost直流升壓電路、并網(wǎng)逆變器以及基于DSP的高性能控制器組成)��。主要功能是實現(xiàn)最大風能捕獲����、并網(wǎng)發(fā)電運行等�����。
DSP根據(jù)檢測到的發(fā)電機的電壓和電流信號�,經(jīng)過處理后���,控制boost升壓電路將盡可能多的電能送至并網(wǎng)逆變器���,并網(wǎng)逆變器將boost電路輸送的電能變換為高質(zhì)量的三相電能送至電網(wǎng)�����。
DSP控制器可通過串行通信接收來自PLC的指令改變并網(wǎng)電流的功率因數(shù)�����、實現(xiàn)并網(wǎng)發(fā)電裝置的啟停等��?��?芍苯优c實驗室中的電力系統(tǒng)并網(wǎng)��,不需要其他附件裝置。
實驗室可配置多套變頻器+異步電機+永磁發(fā)電機�,共用一套并網(wǎng)電力電子裝置,實驗時錯開實驗內(nèi)容及步驟���,最大化的利用實驗資源�����,提高設備利用率。
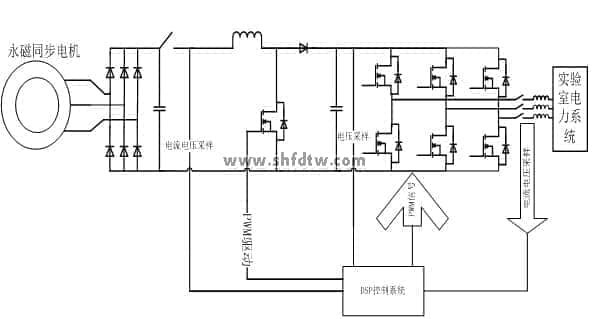
圖2 永磁同步電機并網(wǎng)發(fā)電裝置
二���、 系統(tǒng)軟件
本風力發(fā)電系統(tǒng)由永磁同步電機���,三相二極管整流電路���,升壓斬波電路和電壓逆變電路構成。使用永磁勵磁同步電機可以實現(xiàn)高一些的效率并且簡化功率變換電路��。采用結(jié)構簡單��,成本低廉的三相二極管整流器,能獲得最大的線電壓�,基波功率因素近似為1��。發(fā)電機和二極管整流器結(jié)合在一起如同一簡單的直流電機。系統(tǒng)中的直流環(huán)節(jié)采用具有升壓功能的Boost變換器��,從前級Boost變換器來看����,風力能量的變化主要表現(xiàn)為電流的變化,Boost變換器的輸出端與逆變器的輸入端連接。直流電經(jīng)過直流斬波電路升壓�,再通過高功率因數(shù)的逆變器變換后將電能送入電網(wǎng)。采用不可控二極管整流器,由于缺乏勵磁控制���,永磁電機產(chǎn)生與電機轉(zhuǎn)軸速度成比例的電動勢�����,為了得到最佳的空氣動力學上的效率���,軸速要根據(jù)風速成正比變化。而永磁電機和二極管整流器系統(tǒng)是完全不可控的�,因此要通過斬波器或者逆變器控制永磁電機獲得的直流電流來實現(xiàn)對轉(zhuǎn)矩的控制,從而得到理想的運行速度���。
主電路和控制框圖如圖3所示��,為了得到寬的變速范圍��,通過三相二極管整流器和IGBT逆變器之間的升壓斬波器,調(diào)節(jié)輸入直流電流以跟從最優(yōu)的參考電流從而跟蹤風力機的最大功率點��。連接在電網(wǎng)的PWM逆變器通過調(diào)節(jié)直流連接電壓將電流送入公共電網(wǎng)����。在逆變器控制結(jié)構中���,采用d-q軸同步參坐標系�����,通過q軸電流控制有功功率,通過d軸控制無功功率�����,采用鎖相環(huán)PLL檢測電網(wǎng)電壓相位角�。
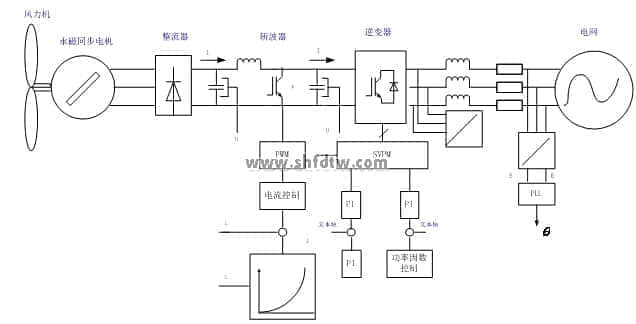
圖3 功率變換控制結(jié)構圖
對于三相電網(wǎng)采用單相同步的方法很難準確的實現(xiàn)dq坐標系與電網(wǎng)三相電壓合成矢量的同步���,必須綜合三相電壓的相位信息���。當電網(wǎng)電壓幅值���,即電壓合成矢量Us的幅值不變時�,Us的q軸分量Usq反映了d軸與電網(wǎng)電壓Us的相位關系�����。Usq>0時��,d軸滯后Us,應增大同步信號頻率�����;Usq<0時���,d軸超前Us�,應減小同步信號頻率���;Usq=0時,d軸與Us同相����。因此���,可通過控制Usq��,使Usq=0來實現(xiàn)兩者之間的同相�����?�;谶@一思想,設計了一種采用DSP實現(xiàn)的三相軟件鎖相環(huán)(SPLL)�����。
圖4所示是三相軟件鎖相環(huán)的結(jié)構框圖,電網(wǎng)電壓經(jīng)坐標變換后得到Usq,經(jīng)過環(huán)路濾波器后改變壓控振蕩器的振蕩頻率。用DSP實現(xiàn)時���,一般采用DSP內(nèi)部定時器的循環(huán)計數(shù)來產(chǎn)生同步信號�����、實現(xiàn)壓控振蕩器和分頻器的功能,因此可通過改變定時器的周期或最大循環(huán)計數(shù)值的方法來改變同步信號的頻率和相位。
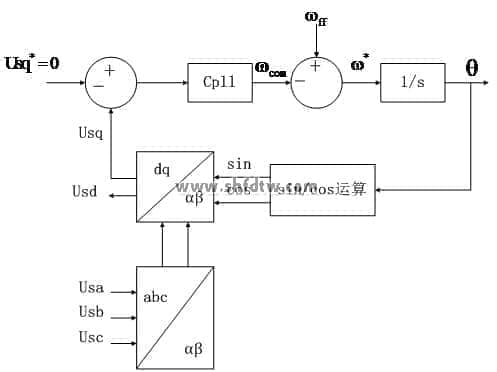
圖4三相軟件鎖相環(huán)結(jié)構框圖
電網(wǎng)電壓和電流的幅值可以通過AD采樣直接得到,而相位的檢測主要有過零檢測和軟件鎖相環(huán)兩種方式���。過零檢測方法是使用比較器將分壓后的電網(wǎng)電壓信號與0電平進行比較�����,比較器輸出的方波信號接到DSP的捕獲管腳�����,DSP軟件根據(jù)捕獲中斷確定每個電網(wǎng)周期的0度�,并在每個控制周期對角度進行相應的累加�,以得到電網(wǎng)電壓相位。軟件鎖相環(huán)方法則是首先對采樣的電網(wǎng)電壓進行坐標變換�,然后對電網(wǎng)電壓的Q軸分量進行閉環(huán)控制,并在此過程中根據(jù)Q軸分量的控制偏差不斷地對電網(wǎng)電壓相位進行校正。
三�、 主要實驗
目前實驗平臺可進行的實驗如表3所示����。
表3 直驅(qū)式實驗平臺開設實驗表
|
編號
|
名稱
|
學生人數(shù)
|
類型
|
|
1
|
異步電機空載實驗
|
每套機組3~5人
|
設計型
|
|
2
|
異步電機負載實驗
|
每套機組3~5人
|
設計型
|
|
3
|
永磁同步發(fā)電機空載實驗
|
每套機組3~5人
|
設計型
|
|
4
|
永磁同步發(fā)電機負載實驗
|
每套機組3~5人
|
設計型
|
|
5
|
變頻器功能參數(shù)設置與操作實驗
|
每套機組3~5人
|
設計型
|
|
6
|
變頻器外部端子點動實驗
|
每套機組3~5人
|
設計型
|
|
7
|
控制電機正反轉(zhuǎn)實驗
|
每套機組3~5人
|
設計型
|
|
8
|
三相電機開環(huán)控制實驗
|
每套機組5~8人
|
設計型
|
|
9
|
三相電機閉環(huán)控制
|
每套機組5~8人
|
設計型
|
|
10
|
帶剎車的隨動系統(tǒng)控制實驗
|
每套機組5~8人
|
設計型
|
|
11
|
風力發(fā)電機正常運行實驗
|
每套機組5~8人
|
設計型
|
|
12
|
風力發(fā)電機脫網(wǎng)保護實驗
|
每套機組5~8人
|
設計型
|
|
13
|
網(wǎng)側(cè)動態(tài)無功補償實驗
|
每套機組5~8人
|
設計型
|
|
14
|
機艙正反轉(zhuǎn)實驗
|
每套機組5~8人
|
設計型
|
|
15
|
手動變槳控制實驗
|
每套機組5~8人
|
設計型
|
|
16
|
風速調(diào)節(jié)控制實驗
|
每套機組5~8人
|
設計型
|
|
17
|
機艙手動按鈕控制實驗
|
每套機組5~8人
|
設計型
|
|
18
|
機艙手動旋鈕控制實驗
|
每套機組5~8人
|
設計型
|
|
19
|
風速自動變槳控制實驗
|
每套機組5~8人
|
設計型
|
|
20
|
風力發(fā)電變槳解纜自動運行綜合實驗
|
每套機組5~8人
|
設計型
|
|
21
|
風力發(fā)電充電控制實驗
|
每套機組5~8人
|
設計型
|
|
22
|
風力發(fā)電逆變實驗
|
每套機組5~8人
|
設計型
|
|
23
|
風力發(fā)電充電控制逆變實驗
|
每套機組5~8人
|
設計型
|
|
24
|
力發(fā)電機發(fā)電原理實驗
|
每套機組5~8人
|
設計型
|
|
25
|
風力發(fā)電系統(tǒng)的直接負載實驗
|
每套機組5~8人
|
設計型
|
|
26
|
風力發(fā)電系統(tǒng)的輸出性能實驗
|
每套機組5~8人
|
設計型
|
3.1 空載特性測試
如圖5所示�����,通過變頻器驅(qū)動異步電動機改變永磁同步發(fā)電機的轉(zhuǎn)速n�,測量并描繪出轉(zhuǎn)速n和永磁同步發(fā)電機空載電勢整流輸出電壓Udc之間的關系����。
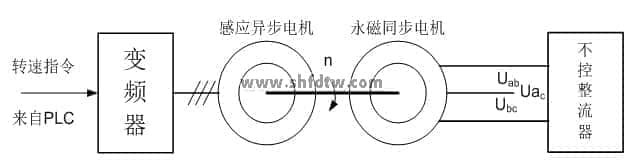
圖5 永磁同步電機空載特性測試
表3 n- Udc 測量記錄
|
轉(zhuǎn)速n (rpm)
|
n1
|
n2
|
n3
|
n4
|
n5
|
n6
|
…
|
ni
|
|
電勢Udc (V)
|
|
|
|
|
|
|
|
|
3.2 負載特性測試
如圖6所示�,通過變頻器驅(qū)動異步電動機改變永磁同步發(fā)電機的轉(zhuǎn)速。固定轉(zhuǎn)速n= ni(i=1,2.3,….),改變負載可調(diào)電阻R,測量永磁同步發(fā)電機整流輸出電壓Udc和輸出電流I���,描繪在轉(zhuǎn)速一定的情況下輸出電流 I-輸出電壓Udc關系曲線以及輸出功率P=UdcI-輸出電流 I關系曲線�����,確定不同轉(zhuǎn)速下的最大功率點。
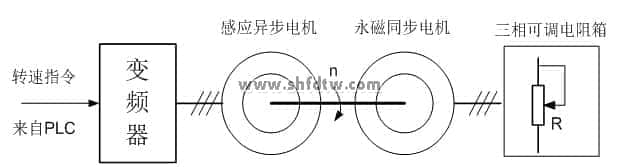
圖6 永磁同步電機帶載特性測試
表4 I- Udc 測量記錄
|
轉(zhuǎn)速
|
n1
|
n2
|
n3
|
n4
|
n5
|
…
|
ni
|
|
|
Udc
|
I
|
Udc
|
I
|
Udc
|
I
|
Udc
|
I
|
Udc
|
I
|
Udc
|
I
|
Udc
|
I
|
|
1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
…
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.3 電力電子接口并網(wǎng)運行實驗
如圖7所示�����,用市電網(wǎng)接調(diào)壓器模擬交流發(fā)電裝置的交流輸出,或?qū)⑹须娋W(wǎng)�、調(diào)壓器結(jié)合整流器視作直流發(fā)電裝置的輸出,測試電力電子接口的性能是否正常����,模擬風電機組或其他分布式發(fā)電裝置的并網(wǎng)功能測試和操作實驗。
A�����、啟動并網(wǎng)和運行測試:并網(wǎng)閘刀K2合上,并網(wǎng)逆變器工作�����;合上閘刀K1后���,啟動直流升壓變頻器投入工作����,從電網(wǎng)汲取電能并將它回饋回電網(wǎng)�。測量和記錄直流環(huán)節(jié)電壓、并網(wǎng)電流和電網(wǎng)電壓的暫態(tài)和穩(wěn)態(tài)波形。改變回饋回電網(wǎng)的功率指令大小��,記錄直流環(huán)節(jié)電壓��、并網(wǎng)電流、電網(wǎng)電壓波形等數(shù)據(jù)��;通過調(diào)節(jié)調(diào)壓器改變輸入電壓的大小,模擬實際輸入電壓的變化��,記錄直流環(huán)節(jié)電壓���、并網(wǎng)電流�、電網(wǎng)電壓波形等數(shù)據(jù)��。
B�、正常停機操作:直流升壓變頻器停止工作��,K1打開,然后并網(wǎng)逆變器停止工作�,K2打開�。測量直流環(huán)節(jié)電壓�����、并網(wǎng)電流和電網(wǎng)電壓的波形。并網(wǎng)閘刀并網(wǎng)逆變器工作。
C�、異常停機操作:PLC實時檢測直流環(huán)節(jié)及并網(wǎng)環(huán)節(jié)的電壓�����、電流等數(shù)據(jù),當超過設定的安全數(shù)值范圍�,報警并依次打開K1、K2開關�����,停止電力電子接口的工作。
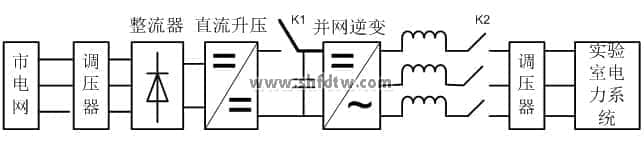
圖7人電力電子接口并網(wǎng)運行實驗
3.4 風力發(fā)電機啟動并網(wǎng)和停機實驗
A、啟動并網(wǎng)操作:并網(wǎng)閘刀K2合上���,并網(wǎng)逆變器工作��;合上閘刀K1后,啟動變頻器驅(qū)動感應電機來拖動永磁同步電機發(fā)電����,當發(fā)電機轉(zhuǎn)速高于切入轉(zhuǎn)速時,直流升壓變頻器投入工作��,當轉(zhuǎn)速穩(wěn)定時��,系統(tǒng)工作在最大功率點上。測量和記錄發(fā)電機轉(zhuǎn)速�����、直流環(huán)節(jié)電壓、并網(wǎng)電流和電網(wǎng)電壓的暫態(tài)和穩(wěn)態(tài)波形�����。
B、正常停機操作:變頻器驅(qū)動感應電機來拖動永磁同步電機發(fā)電����,逐步降低發(fā)電機轉(zhuǎn)速,當發(fā)電機轉(zhuǎn)速低于切入轉(zhuǎn)速時���,直流升壓變頻器停止工作,K1打開,然后并網(wǎng)逆變器停止工作�,K2打開����。測量發(fā)電機轉(zhuǎn)速��、直流環(huán)節(jié)電壓、并網(wǎng)電流和電網(wǎng)電壓的波形�����。并網(wǎng)閘刀并網(wǎng)逆變器工作。
C���、異常停機操作:PLC實時檢測感應電機�、永磁同步發(fā)電機�����、直流環(huán)節(jié)及并網(wǎng)環(huán)節(jié)的電壓��、電流等數(shù)據(jù)����,當超過設定的安全數(shù)值范圍,報警并打開K2�����、K1開關��,停止變頻器工作����。

圖8 永磁同步電機并網(wǎng)運行實驗
3.5 風力發(fā)電機正常運行實驗
風力發(fā)電機已完成并網(wǎng)正常運行�,改變永磁發(fā)電機轉(zhuǎn)速,測量記錄發(fā)電機轉(zhuǎn)速����、直流環(huán)節(jié)電壓、并網(wǎng)電流和電網(wǎng)電壓的波形變化�����、以及并網(wǎng)輸出功率的變化�����,確認系統(tǒng)工作穩(wěn)態(tài)下始終在最大功率點上���,計算并網(wǎng)電流的諧波畸變和功率因數(shù)�����。
3.6 脫網(wǎng)保護實驗
通過調(diào)壓器降低并網(wǎng)接入點的電壓�����,但電壓低于設定的值而并網(wǎng)電流過大時�����,K1打開,然后K2打開����,完成脫網(wǎng),隨后永磁發(fā)電機逐步降低轉(zhuǎn)速,實現(xiàn)停機����。測量記錄發(fā)電機轉(zhuǎn)速���、直流環(huán)節(jié)電壓���、并網(wǎng)電流和電網(wǎng)電壓的波形變化�����、以及并網(wǎng)輸出功率的變化。

圖9 脫網(wǎng)保護實驗
3.7 網(wǎng)側(cè)動態(tài)無功補償實驗
通過PLC檢測并網(wǎng)電流的功率因數(shù)和無功大小���,發(fā)出無功補償功率指令,并網(wǎng)逆變器執(zhí)行無功補償指令�,測量記錄發(fā)電機轉(zhuǎn)速、直流環(huán)節(jié)電壓���、并網(wǎng)電流和電網(wǎng)電壓的波形變化��、以及并網(wǎng)輸出有功和無功功率的變化���。
除基本實驗外����,實驗室還可以進一步開發(fā)以下實驗���,供演示或者驗證。
?風速與輸出功率特性實驗
?風能最大功率捕獲驗證實驗
?系統(tǒng)控制編程實驗
?網(wǎng)絡功能遠程控制實驗
?I/O控制實驗等

消息")